한참 전 진공관 파워앰프를 자작하고선 어울릴만한 프리앰프를 찾아 여타 다른 기타키드들처럼 다양한 멀티, 랙을 찾아보게 되었다.
멀티이펙터 좀 쓰다 멀티 특유의 이쁜데 맥아리없는 사운드에 실망해서 부두밸브를 신품으로 구입했었다. 그때 대략 70정도 줬던거 같은데.. 사운드는 역시 명불허전이었다.
진공관 장착되고 이큐는 거의 극강이라 표현할 수 있는 범위가 엄청 넓었는데.. 문제는 내부를 들여다보니 진공관은 그냥 버퍼용? 입력쪽에 그냥 거쳐가는 역할뿐이고 1랙사이즈 구성이라 조작하려면 노브를 엄청 돌려야 하는게 피곤하고, 어떻게든 이큐를 돌려도 락트론 냄새가 남아있는 소리에 뭔가 부족한데 뭐다른거 없을까 다시 고민하게 되었다.
그러다가 보스 gt8 좋아보여서 아쉽지만 부두랑 맞교환해서 사운드 좀 들어봤는데 최신 기종에 기능은 엄청 좋고 공간계 날라다니는데 문제는 항상 이쁜데 맥아리없는 소리-_-;
진공관 파워앰프에 물리면 그나마 좀 나아지지만 뭔가 앰프 앞에서 듣고 있어도 어딘가 사운드가 비어있는 느낌? 하~ 맘에 드는거 없나.. 또 이리저리 뮬 중고장터를 기웃거리게 되었다.
같은 합주실의 다른 밴드 형님이 쓰던 하플러 t3가 장터에 싸게 올라오길게 바로 구입해서 사운드를 들어보았다.
오~ 진공관 2개에서 뿜어져 나오는 소리! 좋다. 두툼하고 후끈 달아오른 진공관사운드~. 이게 바로 진정한 드라이브톤이지캬캬캬.
근데 좀 쓰다보니 또 뭔가 아쉬운게 눈에 보인다.
우선, 이넘은 공간계가 없다. 그래서 임시로 gt8을 페달보드로 쓰면서 gt8을 공간계로 활용했다. 이렇게 되니까 라인이 너무 복잡해졌다.
기타 -> gt8 send -> 하플러 -> gt8 return -> 앰프 여기에,
하플러 <-> gt8 미디연결
기타 하플러 바로 연결할 수 있지만 하플러 앞에 컴프나 와우, 부스트같은 기능도 써야하니;;;
이러니 뭔가 톤이 깍아 먹는다는 느낌? 하플러 앰프 다이렉트일때는 두툼하고 후끈했던 느낌이 거의 사라져 버렸다-_-;;
또한, 하플러 자체적으로 문제가 좀 있었는데 이넘 이거 미들이 없다? 이큐노브를 보면 베이스, 하이 있고 베이스 노브를 잡아당기면 미들이 살짝 바뀌는 것 밖에 없다. 그러니까 내가 생각하는 미들 스쿱을 만들겠다면 그냥 베이스 올리고 하이를 올리면 미들이 낮아진거라 생각해야 한다.
또 문제가 있는데 이넘 이큐 이거 일반적인 기타앰프 3밴드 이큐가 아니라 액티브 이큐에 고정주파수 조절방식이었다.이게 느낌이 뭔가 이질감이 느껴진다랄까... 야 이씨. 뭔 제품을 이렇게 하나씩 부족하게 만드냐ㅋ.
그래서 다 뜯어서 개조를 했지ㅎㅎㅎ.
속을 뜯어보니까 이거 진공관앞에 opamp로 볼륨부스팅 걸고 이큐는 오디오이퀄라이저 회로처럼 구성되어 있더구만.
다 뜯어내고 진공관 하나 더 추가해서 메사 렉티파이어 프리 회로랑 똑같이 개조해버렸다.
노브도 다 바꾸고 3채널인데 2채널노브 구성에 토글스위치로 3채널 선택할 수 있게하고...
이거도 좀 쓰다보니 또 질려버렸다. 너무 렉티소리뿐이야. 마샬이라든가, 펜더 클린톤도 만들고 싶은데...
뭐 좋은거 없을까하다가 디지텍 gsp2101 소리를 들어봤는데. 오~ 소리 괜찮은데? 공간계까지 올인원이야?
멀티처럼 디지털 방식인데 드라이브는 진공관이네? 사야대나...
이 당시 axe-fx가 출시되고 랙이펙터 쓰는 사람들이 대부분 axe-fx로 넘어가는 바람에 구형 렉이펙터가 많이 중고로 나왔었다. 나또한 axe-fx를 돈 모아서 사볼까 생각했다가 저런 전문적인 장비는 줘도 못쓸거 같아서 나중에 싼값에 중고로 나오면 사야지하고 gsp2101를 알아보던 중에 2101이 패치갭 등 몇가지 문제점이 있다하여 그 상위버젼인 vgs2120을 구입했다.
장터에 올라온거 보니 상태 깔끔하고 페달까지 택포해서 35만.
바로 전화해서 계좌로 돈보내고 바로 다음날 받았다.
오오~ 자줏빛 영롱한 자태. 출시한지 오래됐지만 상태가 너무 좋아서 엄청 맘에 들었다.
문제는,
2101의 후끈한 진공관 사운드는 어디로 내다버린건지...
뭔가 사운드가.. 정제되어 있다는 느낌? 10밴드 이큐가 기본 장착이라 다양한 사운드표현이 되긴 하는데.. 나한테는 뭔가 아쉬운 느낌.. 묵직한 사운드는 절대 만들수 없다랄까.. 물론 공간계쪽에 별도 이큐 기능을 쓰면 가능할거 같은데 그건 근본적인 해결책이 아니다. 기본적인 기능으로부터 사운드를 만들어가야지...
기본 상태에서 해결안된다면 답은 뭐겠나.. 개조를 해야지ㅎㅎ.
회로도 구하고 속을 뜯어봤는데 문제가 심각하구만...

클린채널하고 디스트채널이 분리가 되어 있다.
진공관 2개로 드라이브톤을 잡는게 아니라 각각 하나씩 따로 동작하고 있다.
저렇게 되면 디스트채널에선 드라이브톤이 디스트가 적게 걸린다. 그냥 쎈 크런치정도 수준으로.
이걸 만회하기 위해 진공관회로 앞에 다이오드클리핑 회로를 집어넣어놨다;;
이제 디스트채널에서 드라이브노브를 돌려서 최대로 올려주면 다이오드클리핑에만 디스트가 많이 걸리게 되고 진공관회로에서는 그냥 진공관냄새만 살짝 먹혀서 사운드가 만들어지게 구성한거 같은데... 이거 뭐 그냥 일반적인 튜브오버드라이브페달이랑 다를게 없자나...

이런거랑 별반 차이 있겠냐고...
두툼하고 후끈 달아오른 빡센 진공관 사운드가 되겠냐고...(그렇다고 이 이펙터들이 나쁘다고 생각하지 않는다. 다만 내가 추구하는 사운드 성향이 다를 뿐)

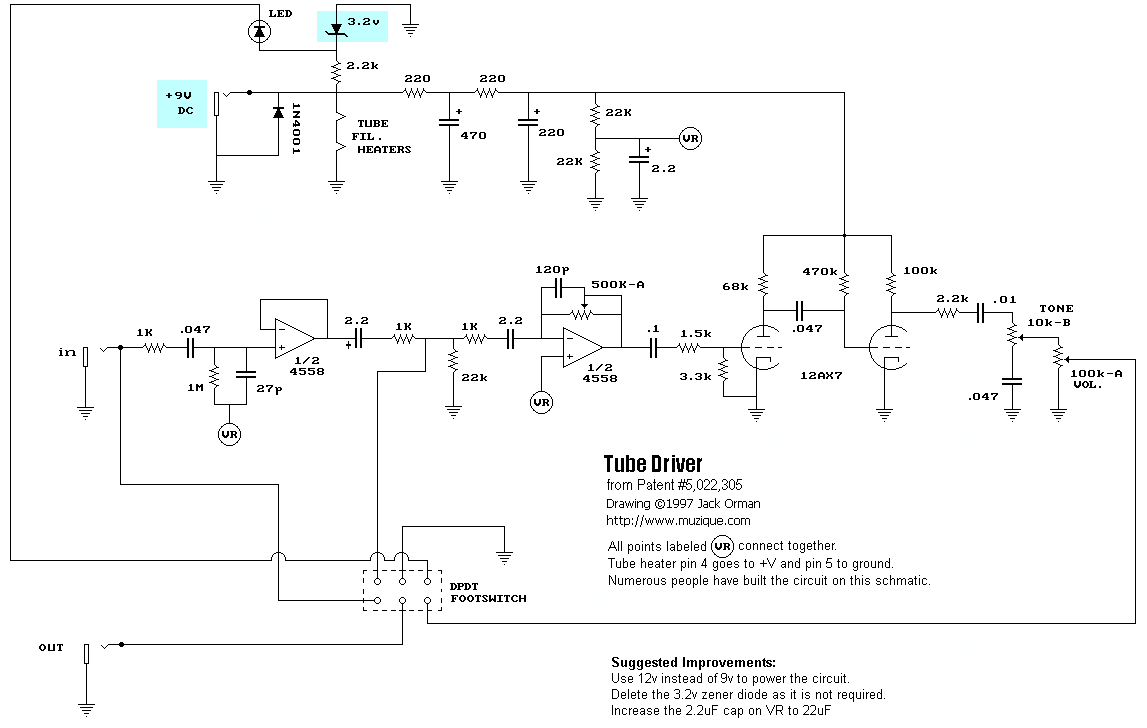
위 회로도가 gsp2101인데 앞의 진공관이 클린채널 담당하고 그 클린사운드를 뒤의 진공관에 연결해서 뒤의 진공관이 디스트사운드를 만들어낸다.
이런걸 원했는데 2120에서는 회로가 다이오드클리핑으로 변경되었다. 이걸 하이브리드라고 해야하나 거참...;
물론 이렇게 다이오드클리핑하고 진공관회로로 구성했다고 사운드가 별로라는 얘기는 아니다. 오히려 거칠지 않고 깔끔하게 사운드가 나오긴 한다.
그런데 내가 원하는 사운드는,
1, 2클린채널은 펜더 사운드;
3디스트채널은 마샬 사운드;
4디스트채널은 모던하이게인(솔다노, 5150) 사운드;
목표로 개조를 시작했다. 오랜 시간을 만지작거리며 2120의 내부를 다 헤집어놓았는데 아직까지도 만족을 못한다.
오늘 개조해서 결과물에 대해 '이정도면 쓸만하겠다'하고 다음날 다시 테스트해보면 '이거 뭐지. 완전 꽝인데'라며 다시 헤집어놓을 정도니까...
이러고 몇년을 마무리 짓지 못했으니 답답해서 한참동안을 짱박아 놓기까지도 했고...
이제 슬슬 마무리를 지어야겠다.
다음 글은 개조 부분에 대해서 하나하나 설명해본다. 나도 오랜시간이 지나니깐 왜 이렇게 바꿨는지 이유를 다 잊어 버리게 되더라...
'Modify > Digitech 2120' 카테고리의 다른 글
| 2018.10.30 Digitech 2120 mod 현 상태.. (0) | 2018.10.30 |
|---|---|
| 2120 mod 스타트~! (0) | 2014.05.27 |