g27을 수리하고선 꽤 오랜 시간이 지났다.
처음 접해보는 레이싱 휠이라 신기하기도 하고 재미도 있었는데... 이게 좀 쓰다보니 몇가지 문제점이 거슬린다.
1. 100% 기어 방식이라 소음이 거슬린다.
2. 휠이 센터에 있을 때 좌우 5도. 합 10도 정도이내에 포스피드백이 느껴지지 않는다.
3. 힘이라고 할까? 포스피드백의 강함이 조금더 강했으면하는 아쉬움.
1번같은 경우는 구글링하다보니 몇가지 개선방법이 나오는데 결론은 구조적으로 해결불가되겠다.
헬리컬 기어 사용으로 소음은 많이 줄었지만 역회전이 걸렸을 때 백래쉬에 의한 기어모터축의 전후 움직임으로 소음이 발생하는데.. 모터축에 달려있는 부품이 모터몸체를 강하게 쳐버린다고 표현해야하나...
개선방법으로는 기어모터축을 앞뒤로 움직이지 않게 스토퍼를 타이트하게 조이는건데


이런식으로 모터의 반대편에 축의 회전을 방해하지 않고 잡아주는 역할을 하는 스토퍼가 있고 저걸 지지하는 스프링의 탄성을 강하게 해서 조여주는 방법이다. 그런데 이 방법이 아이러니한게 타이트하게 조여주면 소음은 엄청 많이 줄어든다. 확실히. 문제는 조여준만큼 회전을 방해하니까 낮은 rpm, 즉 작은 신호의 포스피드백 상태에서는 휠이 반응하지 않는다. 센터 포스피드백 데드존 영역이 더 늘어나는거지ㅋㅋㅋ. 그리고 더 직접적인 문제는 너무 타이트하게 세팅해 놓으면 usb연결하고 켈리할때 휠이 안돌아간다ㅋㅋㅋ.
그럼 어떻게 해야 하냐. 타이트하게 조여주고 작은 신호에서의 데드존에서도 포스피드백이 살아있게 하려면...
결론은 모터를 강하게 돌리는 방법뿐이다. 속도를 높이거나 토크가 강한 넘으로 교체하거나...
그럼 지금 바로 해볼 수 있는 방법은 속도를 높이는거다. 속도를 높이려면 전압을 높게 줘야한다.
그래서 구글링하다보니 전압 모드란게 있더라ㅎㅎ.
기존 g27의 전원 입력 전압은 24V인데 SMPS로 입력 받고 있다. 이 전압을 두배로 올려주면 모터에 인가되는 전압도 두배로 올라가고 회전속도, 토크도 두배로 올라간다. -> https://www.youtube.com/watch?v=iHe0O6UcMK8
이 arc모드는 자세한 내용은 여기서 잘 안알려준다. 내용을 보면 돈 받고 키트를 팔거나 휠을 보내면 개조 작업을 해주는 거 같다. 지금은 안해준다. 요즘 누가 로지텍 G시리즈를 개조하겠나... 걍 상위 제품으로 기변하겠지ㅋ.
결과물은 아래 영상으로 알수 있다. ->
https://www.youtube.com/watch?v=tJzVPrjNCeI
https://www.youtube.com/watch?v=RTHGa3g8azk
우선 메인보드를 살펴보자.
개조 포인트는 3개 정도이다.
1. 전원전압을 32V정도로 올리면 전원이 켜지지 않는다 -> 모터 드라이버에 연결된 TVS다이오드를 바꿔야한다.
TVS다이오드의 과전압이 30V정도인데 이 전압을 넘어서면 +, -가 서로 도통되어 메인보드 전원회로에서 전압을 차단시킨다. -> 제거하거나 과전압이 48V이상인 TVS다이오드로 교체해야 한다. 그런데 현재 TVS를 가지고 있지 않아. 임시로 56V바리스터로 교체했다.
2. 기존 4951, 9977드라이버 IC의 사양이 최대 60V, 3.5A정도이다. 문제는 없는데 좀더 여유로운 높은 사양의 FET로 바꾸는게 좋을 거다. -> F9530n(100V, 14A) 6R199P(650V, 16A) 사양으로 교체했다.
3. 기존 24V에서 두배인 48V로 전압이 인가되기 때문에 모터 드라이버 주위의 회로 시정수도 몇 군데 변경되었다.
-> 3k -> 5.6k, 2.7k -> 4.8k

변경 후 메인보드

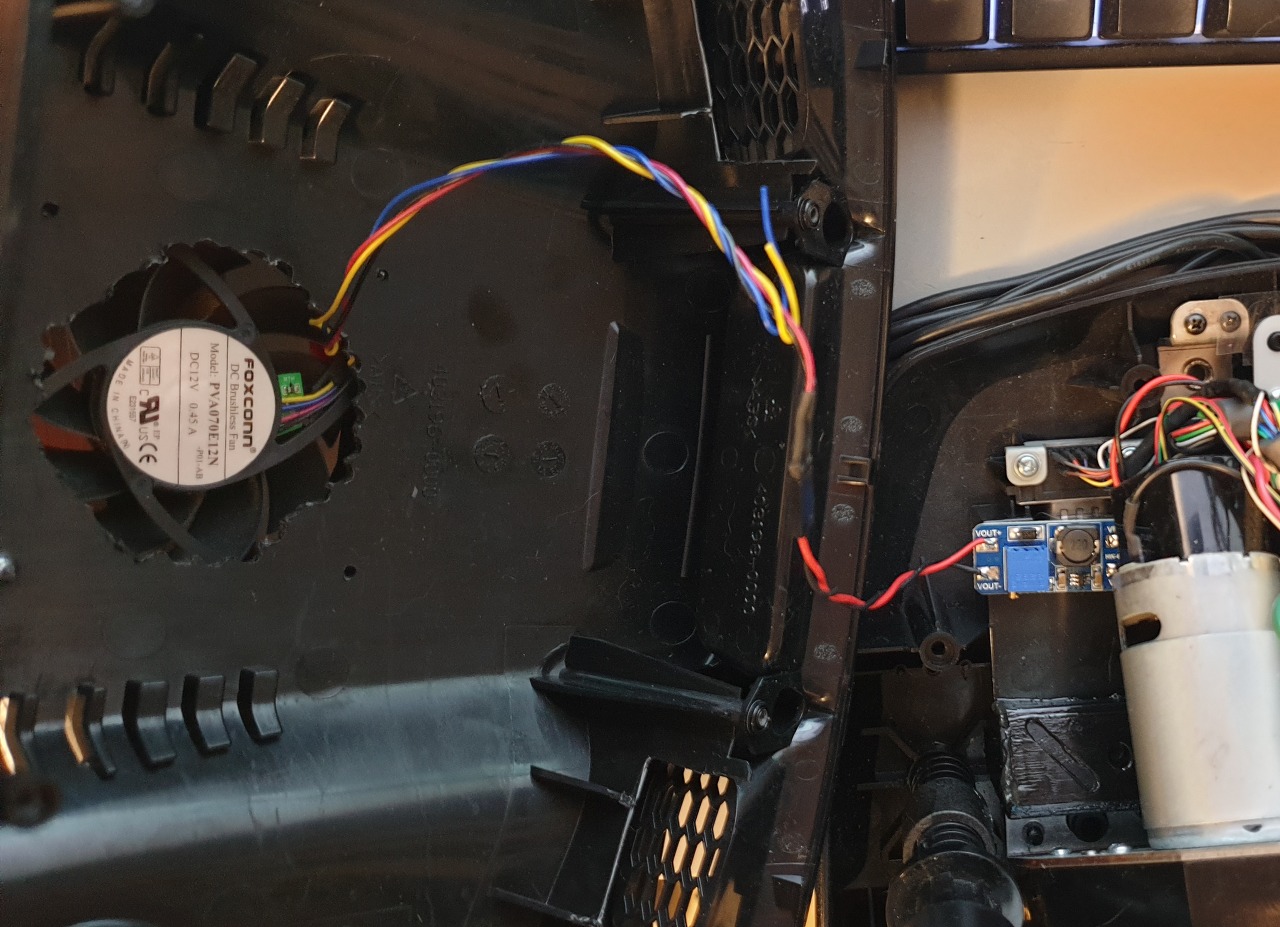
덤으로 24V로 동작하는 모터를 두배인 48V로 동작시킬 때 모터에서 열이 많이 날거라 상단에 안쓰는 쿨링팬도 달아줬다. 전원은 USB쪽 5V를 DCDC회로 통해서 9V정도로 팬에 인가해준다. 12V는 너무 시끄럽고..


기존 SMPS는 사용할 수 없으니 적당히 굴러다니는 48V짜리SMPS로 출력전압 맞춰서 연결해주고

동작을 시켜보기전에 정상적인 전압으로 동작시켜보고 비교해보자.
https://youtu.be/NvUeao1f2ZE
이제 48V로 동작시킨 영상이다.
자~. 이제 센터 데드존도 많이 줄어들은거 같고 함 달려보자라고 생각했는데 역시나 문제가 생겼다. 아주 심각한...

결론은 장시간 테스트하던 도중에 FET가 죽어버렸고 전압을 48V를 인가했더니 최대 인가전압이 40V인 부품 몇개와 저항 몇개가 죽어버렸다ㅋㅋㅋ.
결국, 회로 디버깅하고 죽어버린 부품들 싹다 갈고 구할 수 없는 부품은 대체품으로 변경해 놓고 다시 24V로 동작시키고 있다.
아이~C, X같은 센터 데드존... 짜증나네ㅋ.
...하지만 여기서 멈출 순 없지.
...회로상에서 데드존을 잡을 수 없다면 모터랑 기어는 그대로 쓰고 회로 자체를 바꿔버리자!!
아두이노 포스피드백 회로로 개조해봐야겠다ㅋㅋ.
'게임' 카테고리의 다른 글
| G27 아두이노 포스피드백 개조... 그리고 결론 (1) | 2022.03.08 |
|---|---|
| 로지텍 g27 레이싱휠 고장 수리(엔코더) (0) | 2021.10.28 |




